Как бы странно это ни звучало, прыгающие роботы — это больше, чем просто трюк. Они полезны при спасении при стихийных бедствиях, исследовании планет и наблюдении. Теперь исследователи могли бы разработать оптимального робота-прыгуна. Это маленькое, незаметное устройство может подпрыгнуть на целых 120 метров в воздух.

Сделать прыгающего бота
Прыгающие роботы обычно полагаются на классический физический механизм: пружину. Пружины накапливают упругую энергию, а затем резко ее высвобождают.
Пружинные прыгающие роботы используют двигатели, чтобы собрать эту упругую энергию, а затем высвободить ее, чтобы подняться в воздух. Этот метод, известный как усиление мощности, позволяет пружинам генерировать больше мощности и выполнять больше работы, чем автономные двигатели.
Эта область исследований удивительно широка. Технология, как правило, вдохновлена природой, особенно прыгающими насекомыми, такими как блохи и кузнечики. Первые применения были космическими. Исследователи стремились исследовать вместе с ними суровую внеземную среду. Такие роботы также нашли применение в опасных средах, таких как спасение при стихийных бедствиях и наблюдение, но основные проблемы по-прежнему связаны с жесткой физикой.
Соавтор доктор Джон Ло, научный сотрудник космической робототехники в Манчестерском университете, объясняет:
Роботы традиционно предназначены для передвижения, перекатываясь на колесах или используя ноги для ходьбы, но прыжки обеспечивают эффективный способ передвижения по местам с очень неровной местностью или там, где имеется много препятствий, например, внутри пещер, через леса, над валунами или даже над поверхностью других планет в космосе.
«Хотя прыгающие роботы уже существуют, существует несколько серьезных проблем при разработке этих прыжковых машин, главная из которых — прыгать достаточно высоко, чтобы преодолевать большие и сложные препятствия. Наша конструкция значительно повысит энергоэффективность и производительность прыгающих роботов с пружинным приводом».
Однако большой проблемой является выбор времени для прыжка.
Преждевременный взлет

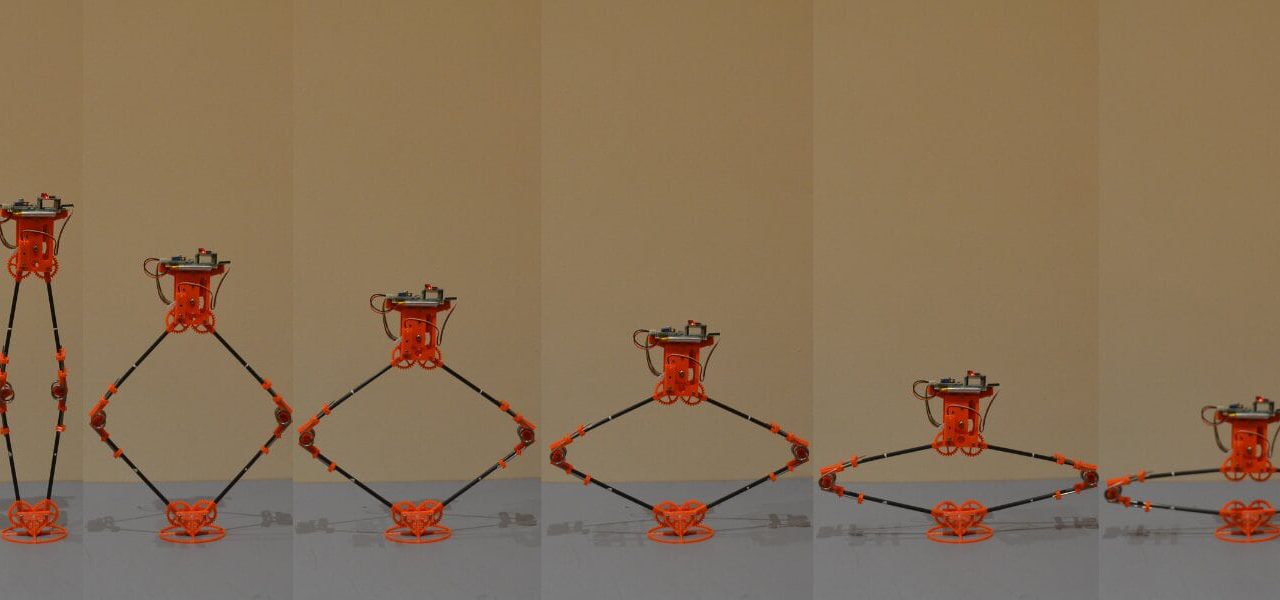
взвод пружины и (d) фазы ускорения. Изображение предоставлено: Ло и Петрушка.
Чтобы быть максимально эффективным, робот должен прыгать в нужное время. Роботам часто не удается достичь максимальной высоты прыжка из-за преждевременного взлета, когда робот отрывается от земли до того, как энергия пружины полностью высвобождается. Это приводит к неполной передаче запасенной упругой энергии в гравитационную потенциальную энергию, что значительно снижает высоту прыжка.
Соавтор доктор Бен Парслю, старший преподаватель аэрокосмической техники, говорит, что совершенно не ясно, как решить эту проблему.
«Было так много вопросов, на которые нужно было ответить, и решений, касающихся формы робота, например, должны ли у него быть ноги, чтобы отталкиваться от земли, как кенгуру, или он должен быть больше похож на спроектированный поршень с гигантской пружиной? Должна ли это быть простая симметричная форма, как у ромба, или это должно быть что-то более изогнутое и органичное?»
В конце концов, основное внимание было уделено устранению ненужных движений при сохранении необходимой прочности и жесткости. Они оказались где-то посередине: робот достаточно маленький, чтобы быть легким и маневренным, но достаточно большой, чтобы нести мотор.
«Наши структурные изменения перераспределяют массу компонентов робота вверх и сужают конструкцию книзу. Более легкие ножки, имеющие форму призмы и использующие только растягивающиеся пружины, — все это свойства, которые, как мы показали, улучшают производительность и, что наиболее важно, энергоэффективность прыгающего робота».
Идеальный дизайн
В исследовании взлеты были разделены на три категории: идеализированный взлет, преждевременный взлет и отсроченный взлет. Идеальный взлет происходит, когда вся накопленная упругая потенциальная энергия полностью высвобождается при взлете. Преждевременный взлет происходит, когда пружина все еще сохраняет потенциальную энергию упругости при взлете, тогда как задержка взлета происходит, когда длина пружины превышает ее естественную длину при взлете, сохраняя избыточную энергию. Как преждевременный, так и задержанный взлет нежелательны, поскольку снижают эффективность преобразования энергии.
Чтобы проиллюстрировать эти взлетные категории, исследователи использовали две простые динамические модели: призматическую многочастичную систему, приводимую в движение поступательной пружиной, и вращающееся твердое тело, приводимое в движение вращательной пружиной.
Призматическая модель продемонстрировала задержку взлета из-за наличия неподрессоренной массы, что привело к уменьшению скорости центра масс. Вращательная модель показала, что центростремительные силы, действующие на вращающиеся массы, могут вызвать преждевременный взлет, что еще больше снизит энергоэффективность.
Однако в конечном итоге ротационная модель оказалась лучше. Концентрируя массу тела и минимизируя массу ног и ступней, этот тип робота может уменьшить инерционные эффекты, которые приводят к преждевременному взлету и неэффективному преобразованию энергии, а также прыжкам в сотни раз больше своего размера.
Однако, несмотря на этот оптимизированный дизайн, у исследователей все еще есть некоторые препятствия. Они нашли способ использовать силу робота, но контролировать его направление по-прежнему остается непростой задачей. Следующая цель — выполнять более контролируемые прыжки, а также использовать энергию, чтобы обеспечить несколько прыжков за один заряд.
Ссылка в журнале: Джон Ло и др., Характеристика динамики взлета и энергоэффективности прыгающих роботов с пружинным приводом, Теория механизма и машин (2024). DOI: 10.1016/j.mechmachtheory.2024.105688.
Спасибо за ваш отзыв!
 EUROPEAN UNION
EUROPEAN UNION 