Newswise — была разработана система тактильного восприятия, способная предоставлять мультимодальную тактильную информацию, подобную человеческой, таким объектам, как роботы и носимые устройства, которым требуются тактильные данные в режиме реального времени.
Исследовательскую группу возглавляет директор по исследованиям Хюнюй Лим из отдела исследований наноконвергентных производственных систем и главный научный сотрудник Ёндо Юнг из отдела природных систем и приложений Корейского института машин и материалов (председатель Сог Хён Рю, именуемый в дальнейшем как «KIMM»), институт, находящийся под юрисдикцией Министерства науки и информационных технологий, разработал мультимодальную систему тактильного восприятия в реальном времени, способную предоставлять мультитактильную информацию в реальном времени, вдохновленную тактильным восприятием человека, и объявил о Результат исследования, опубликованного в известном журнале «Soft Robotics». (ЕСЛИ: 7,9)*
*Название публикации: Вдохновленная человеком система тактильного восприятия для мультимодального обнаружения тактильных стимулов в реальном времени (Дата публикации: 19 декабря 2023 г.)
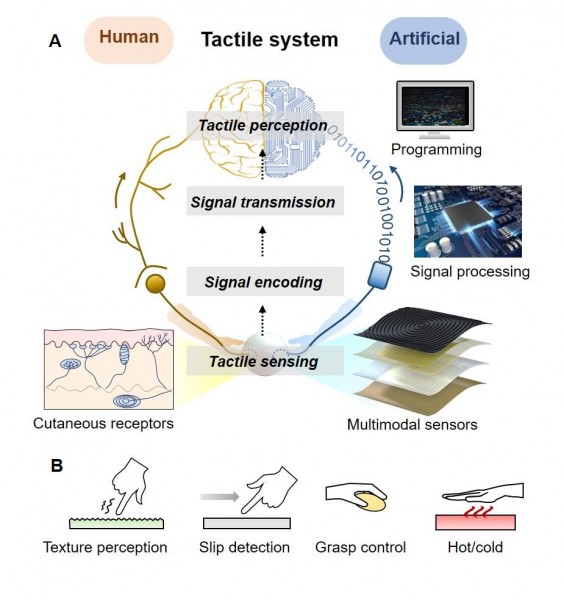
Исследовательская группа разработала мультимодальную систему тактильного обнаружения в реальном времени, имитируя принцип, согласно которому различные типы тактильной информации воспринимаются различными сенсорными рецепторами на коже человека и передаются в мозг в режиме реального времени. Эта система состоит из четырех трехмерных тактильных датчиков, модуля обработки/передачи сигналов и модуля анализа. Система успешно распознает различные типы тактильных стимулов и текстур поверхности, а также дифференцирует сложные движения в реальном времени.
Четыре типа тактильных датчиков, каждый из которых определяет температуру, вибрацию, силу сдвига и вертикальное давление, ламинированы в трехмерную структуру на основе технологии трехмерной (3D) печати гибкими электродами. В то же время эти датчики подключаются к FPCB (гибкой печатной плате) электронного модуля обработки и передачи сигналов, тем самым легко передавая обработанную сигналом тактильную информацию через соответствующий терминал подключения FPCB.
В предыдущих исследованиях требовались сложные внешние измерительные устройства и аналитическое оборудование для обнаружения сигналов, генерируемых соответствующим устройством, чтобы можно было обнаружить различные формы тактильных стимулов. Поэтому было сложно применить эти устройства к носимым устройствам или роботам в виде простой автономной системы.
С другой стороны, в недавно разработанной мультимодальной системе тактильного восприятия несколько типов тактильных датчиков расположены вертикально в трехмерной структуре. Кроме того, разработан модуль преобразования, передачи и анализа сигналов, что позволяет реализовать систему в компактном и простом виде и делает ее применимой к реальным роботам и носимым устройствам.
Директор по исследованиям Хёнуи Лим из KIMM сказал: «Имитируя сенсорную систему человека, мультимодальная система тактильного восприятия в реальном времени способна воспринимать несколько чувств одновременно. Более того, это технология, которая решила проблемы, которые могут быть вызваны сложными и большими системами обработки и обнаружения сигналов при использовании обычных датчиков». Она добавила: «Применяя эту систему к роботам или носимым устройствам, мы сможем получать большой объем разнообразной и сложной тактильной сигнальной информации, что, как мы надеемся, будет способствовать улучшению общественного благосостояния и безопасности».
Между тем, это исследование было поддержано Программой развития конвергентных технологий для бионической руки» через Национальный исследовательский фонд (NRF) Кореи, финансируемой Министерством науки и информационных технологий (2014M3C1B2048177), и Программой фундаментальных исследований KIMM (№ NK242C). Республика Корея.
###
Корейский институт машин и материалов (KIMM) — это некоммерческий научно-исследовательский институт, финансируемый государством, подведомственный Министерству науки и информационных технологий. С момента своего основания в 1976 году KIMM вносит свой вклад в экономический рост страны, выполняя исследования и разработки в области ключевых технологий в области машин и материалов, проводя оценку испытаний на надежность и коммерциализируя разработанные продукты и технологии.
Это исследование было поддержано Программой развития конвергентных технологий для бионической руки» через Национальный исследовательский фонд (NRF) Кореи, финансируемой Министерством науки и информационных технологий (2014M3C1B2048177), и Программой фундаментальных исследований KIMM (№ NK242C), Республика Корея. Корея.
 EUROPEAN UNION
EUROPEAN UNION 